Gaza Basalım!
Genel Bakış
Bu uygulamada DC Motor modülümüzü kullanarak kendimize bir pervane yapacağız. Öncelikle DC motor modülümüzü ve IotBot’umuzu birbirine iletişim kabloları ile bağlamalıyız. Ancak burada dikkat etmemiz gereken şey Motorları kullanmak için yüksek enerji gereksinimi olmasıdır. Bu enerjiyi işlemcimiz yeterince oluşturamaz. Bu sebeple motoru işlemciden gelecek komutlara göre çalıştıran bir ‘Motor Sürücü’ kullanmalıyız. Şansıyız! IotBot üzerinde bundan bir adet bulunuyor. Kornanın hemen üstünde yer alan dikdörtgen şeklindeki siyah şey bizim motor sürücümüz. Bu motor sürücüsünü kullanmak için işlemci üzerinden sinyal gönderip sağ tarafında bulunan iletişim portundanda motor modülümüzü bağlamalıyız. Ardından programlamaya geçelim.
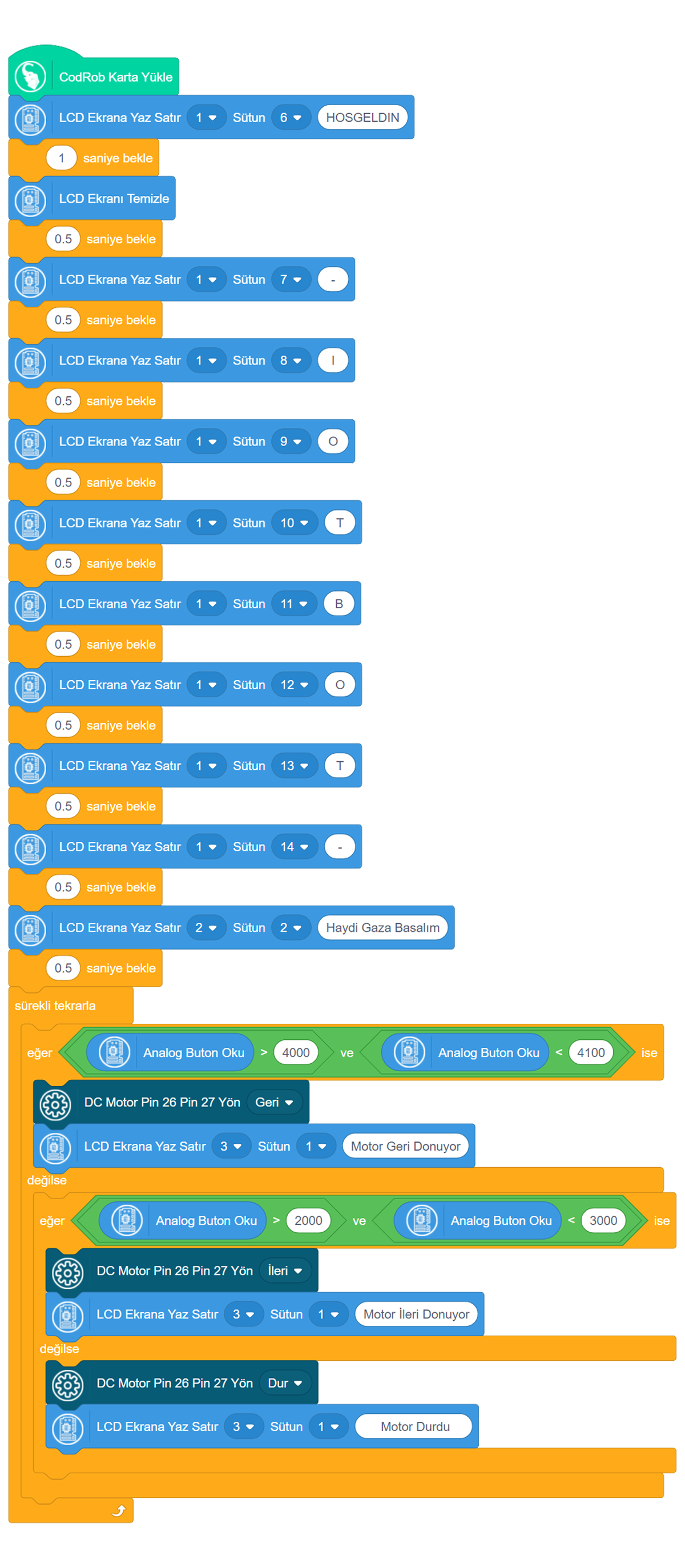
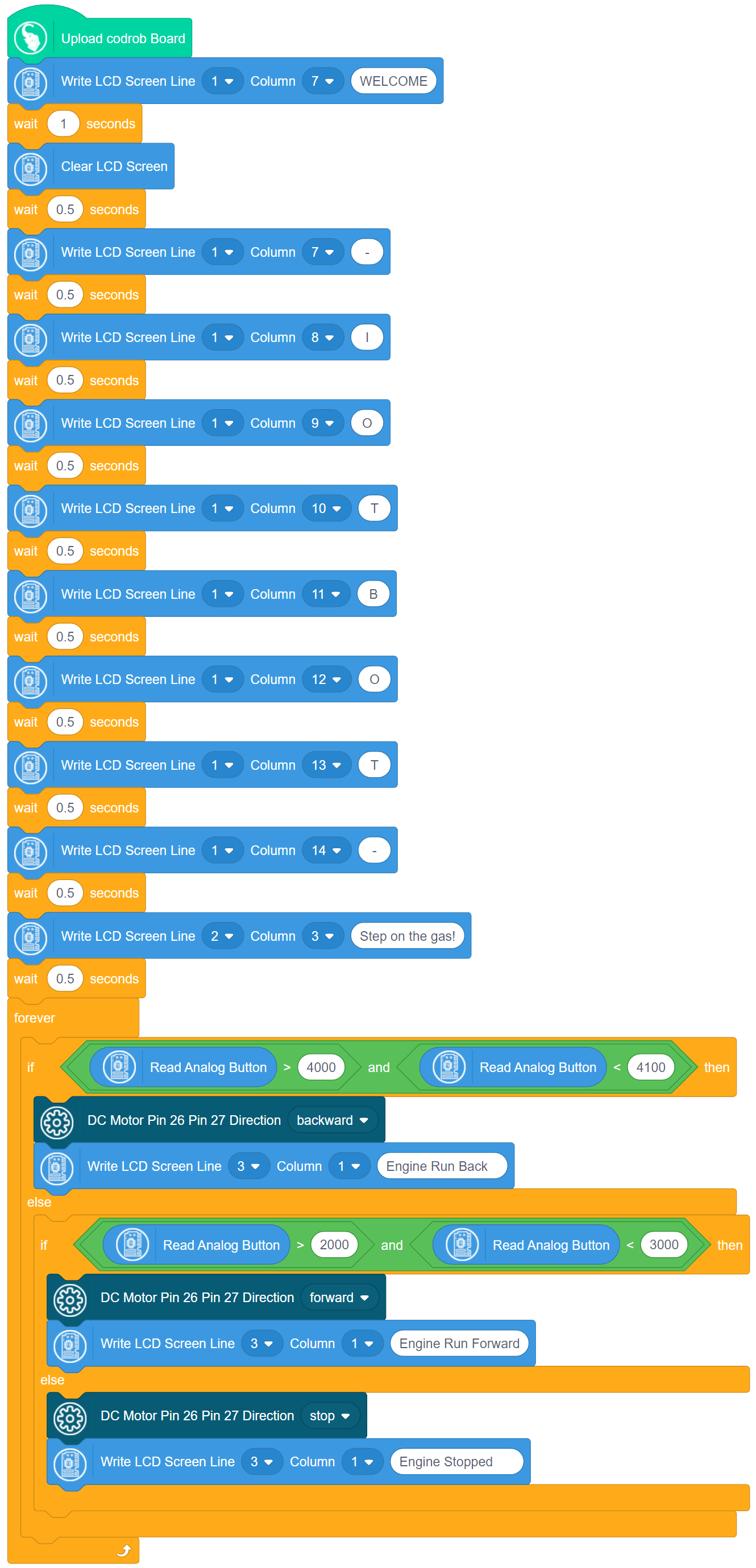
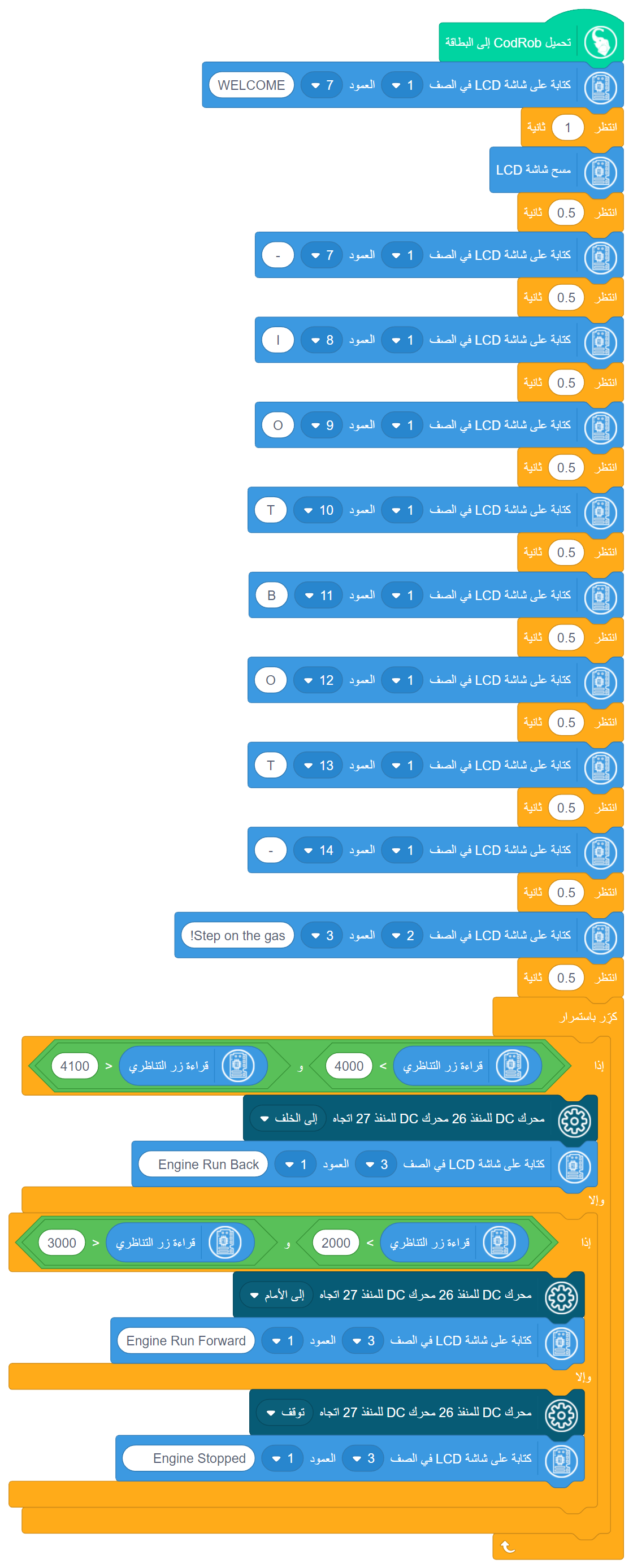
Bağlamış olduğumuz DC Motor modülünü kontrol etmek için IotBot üzerinde 4. pinde bulunan analog butonları kullanabiliriz. Bir butona bastığımızda 26. ve 27. pinde yer alan motoru ileri yönde, diğer butona bastığımızda ise geri yönde hareket ettirebiliriz. Gönderdiğimiz komutları görebilmek için LCD ekranda geri bildirimler yazmayıda unutmayalım. Bunun için CODROB Editör üzerinden ilgili kod bloklarını sürükleyelim ve IotBot’umuza yükleyelim. Peki ama bu nasıl duracak?
Motorumuzu durdurmak içinde encoder, joystick ya da Io0 butonlarından herhangi birini kullanabiliriz. Bu size kalmış. Hadi kendimize bir pervane yapalım ve serinleyelim!